
สินค้า

บัฟเฟอร์โรตารีพลาสติกแรงบิดสูงพร้อมเฟือง TRD-C2
ข้อมูลจำเพาะโช้คอัพแบบโรตารี่ขนาดเล็ก
| แบบอย่าง | แรงบิดที่กำหนด | ทิศทาง |
| ทีอาร์ดี-ซี2-201 | ( 2 0 ± 6 ) X 1 0– 3น · ม. | ทั้งสองทิศทาง |
| ทีอาร์ดี-ซี2-301 | ( 3 0 ± 8 ) X 1 0– 3น · ม. | ทั้งสองทิศทาง |
| ทีอาร์ดี-ซี2-อาร์301 | ( 3 0 ± 8 ) X 1 0– 3น · ม. | ตามเข็มนาฬิกา |
| ทีอาร์ดี-ซี2-แอล301 | ( 3 0 ± 8 ) X 1 0–3น · ม. | ทวนเข็มนาฬิกา |
การวาดแดมเปอร์เกียร์
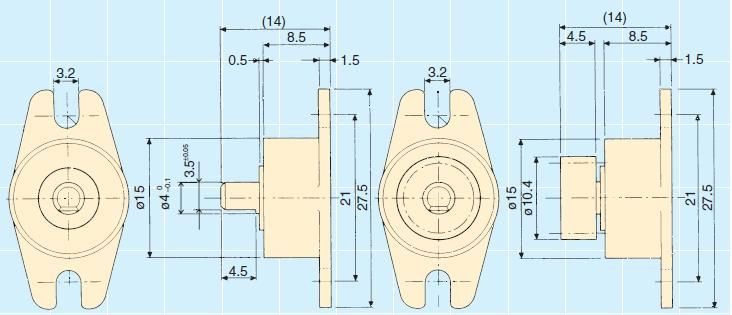
ข้อมูลจำเพาะของโช้คอัพเกียร์
| พิมพ์ | เฟืองตรงมาตรฐาน |
| โปรไฟล์ฟัน | ม้วนเข้า |
| โมดูล | 0.8 |
| มุมความดัน | 20° |
| จำนวนฟัน | 11 |
| เส้นผ่านศูนย์กลางวงกลมพิทช์ | ∅8.8 |
ลักษณะของแดมเปอร์
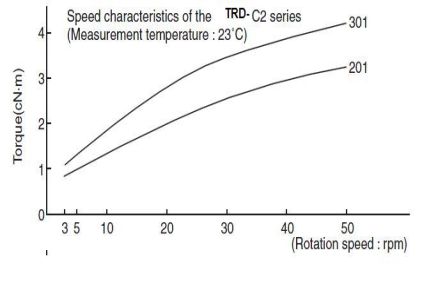
1.ลักษณะความเร็ว
แรงบิดของแดมเปอร์แบบหมุนจะเปลี่ยนแปลงตามความเร็วรอบ โดยทั่วไป แรงบิดจะเพิ่มขึ้นตามความเร็วรอบที่สูงขึ้น และจะลดลงตามความเร็วรอบที่ต่ำลง ดังแสดงในกราฟ นอกจากนี้ แรงบิดเริ่มต้นอาจแตกต่างจากแรงบิดที่กำหนดเล็กน้อย
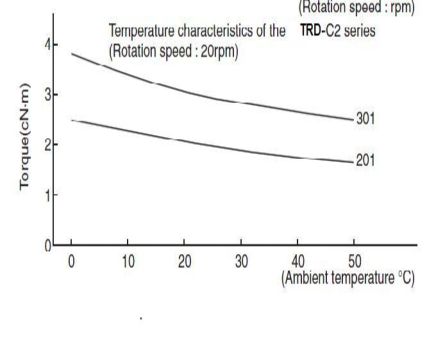
2. ลักษณะอุณหภูมิ
แรงบิดของแดมเปอร์โรตารี่จะเปลี่ยนแปลงตามอุณหภูมิโดยรอบ อุณหภูมิที่สูงขึ้นจะลดแรงบิด ในขณะที่อุณหภูมิที่ต่ำลงจะทำให้แรงบิดเพิ่มขึ้น
การใช้งานสำหรับโช้คอัพแบบโรตารี่แดมเปอร์

1. แดมเปอร์แบบหมุนเป็นส่วนประกอบควบคุมการเคลื่อนไหวอเนกประสงค์สำหรับการใช้งานปิดแบบนุ่มนวล แดมเปอร์เหล่านี้ถูกนำไปใช้งานในที่นั่งในห้องประชุม ที่นั่งในโรงภาพยนตร์ และที่นั่งในโรงละคร
2. นอกจากนี้ โช้คอัพแบบหมุนยังใช้กันอย่างแพร่หลายในหลากหลายอุตสาหกรรม เช่น ที่นั่งรถบัส ที่นั่งห้องน้ำ และการผลิตเฟอร์นิเจอร์
3. โช้คอัพแบบโรตารี่ยังจำเป็นต่อการควบคุมการเคลื่อนที่ที่ราบรื่นในเครื่องใช้ไฟฟ้าภายในบ้าน เครื่องใช้ไฟฟ้าในชีวิตประจำวัน ยานยนต์ รถไฟ และภายในเครื่องบิน นอกจากนี้ โช้คอัพแบบโรตารี่ยังมีบทบาทสำคัญในระบบเข้า-ออกของเครื่องจำหน่ายสินค้าอัตโนมัติ
-

โช้คอัพโรตารี่พลาสติกขนาดเล็ก TRD-CB ในรถยนต์...
-

บัฟเฟอร์โรตารีพลาสติกขนาดเล็กพร้อมเฟือง TRD-TI i...
-

TRD-CG3F-J ฮาร์ดแวร์แดมเปอร์โรตารี่ขนาดเล็กแบบแม่นยำ...
-

TRD-CG5-A โช้คอัพโรตารี่ขนาดเล็กสำหรับภายในรถยนต์
-

ซัพพลายเออร์แดมเปอร์โรตารี่ขนาดเล็กในประเทศจีน
-

บัฟเฟอร์โรตารีพลาสติกแรงบิดสูงพร้อมเฟือง TRD-DE


